
Inhoudsopgave:
- Auteur John Day day@howwhatproduce.com.
- Public 2024-01-30 11:15.
- Laatst gewijzigd 2025-01-23 15:01.

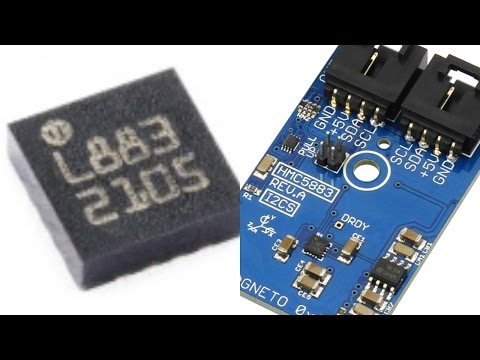
De HMC5883 is een digitaal kompas dat is ontworpen voor magnetische waarneming in een laag veld. Dit apparaat heeft een groot magnetisch veldbereik van +/- 8 Oe en een uitgangssnelheid van 160 Hz. De HMC5883-sensor bevat automatische demagnetiserende riemdrivers, offset-annulering en een 12-bits ADC die een nauwkeurigheid van 1° tot 2° mogelijk maakt. Alle I²C-minimodules zijn ontworpen om te werken op 5VDC.
In deze tutorial gaan we de gedetailleerde werking van HMC5883 met Arduino nano uitleggen.
Stap 1: Benodigde hardware:



De materialen die we nodig hebben om ons doel te bereiken, omvatten de volgende hardwarecomponenten:
1. HMC5883
2. Arduino Nano
3. I2C-kabel
4. I2C-schild voor Arduino Nano
Stap 2: Hardware-aansluiting:


De hardware-aansluitingssectie legt in feite de bedradingsverbindingen uit die nodig zijn tussen de sensor en de arduino nano. Zorgen voor correcte verbindingen is de basisbehoefte bij het werken aan elk systeem voor de gewenste output. De vereiste verbindingen zijn dus als volgt:
De HMC5883 werkt via I2C. Hier is het voorbeeldbedradingsschema, dat laat zien hoe elke interface van de sensor moet worden aangesloten.
Out-of-the-box, het bord is geconfigureerd voor een I2C-interface, daarom raden we aan om deze aansluiting te gebruiken als je verder agnostisch bent. Alles wat je nodig hebt zijn vier draden!
Er zijn slechts vier aansluitingen nodig Vcc, Gnd, SCL en SDA-pinnen en deze worden verbonden met behulp van I2C-kabel.
Deze verbindingen worden gedemonstreerd in de bovenstaande afbeeldingen.
Stap 3: Arduino-code om de intensiteit van het magnetische veld te meten:


Laten we nu beginnen met de Arduino-code.
Bij het gebruik van de sensormodule met de Arduino nemen we de Wire.h-bibliotheek op. De "Wire"-bibliotheek bevat de functies die de i2c-communicatie tussen de sensor en het Arduino-bord vergemakkelijken.
De volledige Arduino-code wordt hieronder gegeven voor het gemak van de gebruiker:
#erbij betrekken
// HMC5883 I2C-adres is 0x1E (30)
#define Addr 0x1E
ongeldige setup()
{
// Initialiseer I2C-communicatie als MASTER
Draad.begin();
// Initialiseer seriële communicatie, stel baudrate in = 9600
Serieel.begin(9600);
// Start I2C-verzending
Wire.beginTransmission (Addr);
// Selecteer configureren register A
Draad.schrijven (0x00);
// Stel de normale meetconfiguratie in, gegevensuitvoersnelheid = 0,75 Hz
Draad.schrijven (0x60);
// Stop I2C-verzending
Wire.endTransmission();
// Start I2C-verzending
Wire.beginTransmission (Addr);
// Selecteer modus register
Draad.schrijven (0x02);
// Stel continue meting in
Draad.schrijven (0x00);
// Stop I2C-verzending
Wire.endTransmission();
vertraging (300);
}
lege lus()
{
niet-ondertekende int-gegevens[6];
// Start I2C-verzending
Wire.beginTransmission (Addr);
// Selecteer dataregister
Draad.schrijven (0x03);
// Stop I2C-verzending
Wire.endTransmission();
// Vraag 6 bytes aan gegevens aan
Wire.requestFrom(Addr, 6);
// Lees 6 bytes aan gegevens
// xMag msb, xMag lsb, zMag msb, zMag lsb, yMag msb, yMag lsb
if(Draad.beschikbaar() == 6)
{
data[0] = Draad.lezen();
data[1] = Draad.lezen();
data[2] = Draad.lezen();
data[3] = Draad.lezen();
data[4] = Draad.lezen();
data[5] = Draad.lezen();
}
vertraging (300);
// Converteer de gegevens
int xMag = ((data[0] * 256) + data[1]);
int zMag = ((gegevens[2] * 256) + gegevens[3]);
int yMag = ((gegevens[4] * 256) + gegevens[5]);
// Gegevens uitvoeren naar seriële monitor
Serial.print("Magnetisch veld in X-as: ");
Serieel.println(xMag);
Serial.print("Magnetisch veld in Y-as: ");
Serial.println(yMag);
Serial.print("Magnetisch veld in Z-as: ");
Serieel.println(zMag);
vertraging (300);
}
In de draadbibliotheek worden Wire.write() en Wire.read() gebruikt om de commando's te schrijven en de sensoruitgang te lezen. Het volgende deel van de code illustreert het lezen van de sensoruitgang.
// Lees 6 bytes aan gegevens // xMag msb, xMag lsb, zMag msb, zMag lsb, yMag msb, yMag lsb if (Wire.available () == 6) { data [0] = Wire.read (); data[1] = Draad.lezen(); data[2] = Draad.lezen(); data[3] = Draad.lezen(); data[4] = Draad.lezen(); data[5] = Draad.lezen(); }
Serial.print() en Serial.println() worden gebruikt om de output van de sensor op de seriële monitor van de Arduino IDE weer te geven.
De output van de sensor wordt getoond in de afbeelding hierboven.
Stap 4: Toepassingen:

HMC5883 is een opbouwmodule met meerdere chips die is ontworpen voor magnetische detectie in een laag veld met een digitale interface voor toepassingen zoals goedkope kompasmeting en magnetometrie. De nauwkeurigheid en precisie op hoog niveau van één tot twee graden maakt voetgangersnavigatie en LBS-toepassingen mogelijk.
Aanbevolen:
Magnetische schakelaar Deuralarmsensor, normaal open, eenvoudig project, 100% werkend, broncode gegeven: 3 stappen

Magnetische deuralarmsensor, normaal open, eenvoudig project, 100% werkend, broncode Gegeven: Beschrijving: Hallo allemaal, ik ga een tutorial maken over het MC-18 magnetische schakelsensoralarm dat in de normaal open modus werkt. Schakelaartype: GEEN (normaal gesloten type), het circuit is normaal open en het circuit is aangesloten wanneer de magneet in de buurt is. Het riet
Draagbare magnetische detector: 5 stappen

Draagbare magnetische detector: dit ontwerp is gebaseerd op de inhoud van deze pagina [http://danyk.cz/hall_en.html] en een video van MRAMAKERs (youtube # 4Xvo60A-Kt0) die een veelvoorkomend onderdeel beschrijft dat wordt aangetroffen in oudere, weggegooide borstelloze computerventilatoren, en dat onderdeel omzetten in
Magnetische 3e hand: 5 stappen (met afbeeldingen)
")
Magnetische 3e hand: Iedereen die met elektronica speelt, weet hoe belangrijk een 3e hand is. Het geeft je de mogelijkheid om soldeer in de ene hand en de soldeerbout in de andere hand vast te houden en eenvoudig soldeer aan een onderdeel toe te voegen. Ik gebruik al een tijdje zelfgemaakte 3e hands
Magnetische camera-arm: 5 stappen (met afbeeldingen)
")
Magnetische camera-arm: ik heb deze magnetische camerabevestiging gemaakt om me te helpen bij het maken van mijn YouTube-video's. Dit is een eenvoudig project om te voltooien. Alle onderdelen zijn gemakkelijk te vinden bij Amazon en uw plaatselijke ijzerhandel
Verander uw Arduino in een magnetische kaartlezer! 9 stappen (met afbeeldingen) Antwoorden op al uw "Hoe?"
 Antwoorden op al uw \"Hoe?\"")
Verander je Arduino in een magnetische kaartlezer! Iedereen heeft geloof ik een magnetische kaartlezer gebruikt. Ik bedoel, wie heeft tegenwoordig contant geld bij zich? Ze zijn ook niet moeilijk te bemachtigen, en tijdens een reis naar mijn favoriete plaatselijke elektronicawinkel vond ik een bak vol met deze jongens. Dus natuurlijk