 Antwoorden op al uw \"Hoe?\"")
Inhoudsopgave:
- Auteur John Day day@howwhatproduce.com.
- Public 2024-01-30 11:16.
- Laatst gewijzigd 2025-01-23 15:01.




Motivatie
Ik hou echt van POV-displays (persistentie van visie)! Ze zijn niet alleen interessant om naar te kijken, maar ook een grote uitdaging om ze te ontwikkelen. Het is echt een interdisciplinaire taak. Je hebt veel vaardigheden nodig: mechanisch, elektronisch, programmeren enzovoort!
Ik heb altijd mijn eigen willen bouwen en het zo groot en capabel mogelijk maken. Een jaar geleden deed ik het! Het was veel werk en erg ingewikkeld om te doen. Ik hou van dit soort uitdagingen. Dus het was leuk;-)
Nu wil ik ook dat je er zelf een bouwt. Je kunt dit als een gids gebruiken om je eigen te ontwikkelen of volg gewoon de instructies om een kopie van mijn POV-weergave te krijgen. Ik zal proberen te wijzen op alle uitdagingen die ik moest overwinnen om de mijne te maken.
Ik heb mijn ontwerp herhaald om het zo gemakkelijk mogelijk te maken om opnieuw te bouwen. Er zijn geen SMT-componenten en alles zou door beginners moeten kunnen worden gesoldeerd. Begrijp me niet verkeerd, het is nog steeds een hele grote uitdaging om alles in elkaar te zetten. Maar het moet te doen zijn!
WAARSCHUWING: Dit project bevat LED's die met hoge snelheden worden bijgewerkt en die mogelijk aanvallen veroorzaken voor mensen met lichtgevoelige epilepsie
Hoe werkt het?
Hier lees je hoe een POV-weergave in het algemeen werkt.
Eerst hebben we een bron nodig die een videosignaal streamt. In het oorspronkelijke ontwerp deed ik het via WIFI. Ik heb een programma geschreven om het scherm van een computer vast te leggen en deze gegevens via WIFI naar een ESP8266 te sturen. Het probleem van deze aanpak is dat de ESP8266 te traag was en de wifi-bandbreedte net genoeg was voor 16 FPS. Dus nu gebruiken we een ESP32. Ik dacht dat alle problemen verholpen waren, maar het bleek dat de ESP32 ook niet meer bandbreedte via WIFI biedt dan de ESP8266. De ESP32 heeft echter voldoende rekenkracht om een videostream te decoderen. Dus uiteindelijk stuurde ik JPEG-afbeeldingen via WIFI naar de ESP32. Daarom host de ESP32 een website. Op deze site kun je afbeeldingen of video's selecteren en de website zal dan JPEG's naar de ESP32 streamen. JPEG-decodering heeft veel geheugen nodig, dus daar hebben we ook een probleem. Maar het werkt voorlopig. Misschien kom ik later met een betere oplossing.
Vervolgens moeten we de LED's zelf aansturen. Om dit te laten werken, moeten we op elk moment de exacte positie van de LED's weten. Daarom heb ik een Hall-effectsensor toegevoegd. Elke rotatie passeert het een magneet en maakt zo de detectie mogelijk. Vervolgens meten we de tijd van de rotatie. We gaan ervan uit dat de volgende rotatie even lang duurt. Daarom kunnen we onze positie berekenen. Dit proces wordt keer op keer herhaald. Om de LED's aan te sturen gebruiken we een FPGA. We zouden ook een microprocessor kunnen gebruiken, maar die zal waarschijnlijk te traag zijn. De meeste buitenste LED's moeten zo'n 10.000 keer per seconde worden ververst. Een FPGA kan de taak gemakkelijk aan en doet dat met minder jitter.
Als de leds zo vaak geüpdatet moeten worden, hebben we ook snelle leds nodig. In mijn oorspronkelijke ontwerp gebruikte ik APA102 LED's. Ze hebben een verversingssnelheid van ongeveer 20 kHz. Ik heb geprobeerd om LED-strips met deze LED's te krijgen, maar de online verkoper stuurde me SK9822's en vertelde me dat ze hetzelfde zijn (twee keer gebeurd …) Dus we zullen de SK9822 gebruiken. Ze hebben slechts een verversingssnelheid van 4,7 kHz, maar dit zal hopelijk voldoende zijn. Ze hebben ook een iets ander protocol. Wees je ervan bewust. Dus de ESP32 duwt de beeldframes naar de FPGA. De FPGA stuurt dan de LED's aan.
Nu hoeven de LED's alleen nog maar te draaien. Daarom gebruiken we een gelijkstroommotor. Deze motor wordt aangestuurd via een PWM-signaal van een ESP8266. De ESP8266 is ook via WIFI verbonden met de ESP32. Daarom hebben we maar één sensor nodig om de rotatiesnelheid te meten. In het originele ontwerp heb ik er twee gebruikt.
Meer informatie over het systeem vind je in mijn video over het originele ontwerp.
Gereedschap
Ik heb de volgende tools gebruikt:
- 3D-printer
- Soldeerbout
- Hete lijm
- superlijm
- Micro-USB-kabel
- Schaar
- Boor + houtboor 3 4 8 en 12mm
- Schroevendraaier
- Platte tang
- Zijsnijder
- Draadstripper
- Verfbenodigdheden
- schuurpapier
Volgorde
Ik opende een TINDIE-winkel. Dus je kunt een kit kopen als je wilt en me helpen meer van dit soort projecten te doen;-)
OSH
Zoals altijd wordt alles wat je hier ziet als open source gepubliceerd.
Updates
Er zijn een aantal dingen die ik in de toekomst wil verbeteren:
-
Hogere kleurresolutie van 12 bit naar 24 bit => daarom hebben we een FPGA nodig met meer RAM =>
Cmod A7, ze zijn pin-compatibel:-)
- ESP32 met PSRAM om geheugenproblemen te voorkomen
- Los het borstelprobleem op…
Benodigdheden
Op maat gemaakte onderdelen
Je moet ze bestellen of een kit bij mij bestellen!
1 * Main PCB (gerber bestanden staan onder de map gerber main.zip)
1 * Motor Driver PCB (gerber-bestanden staan onder de map gerber motor.zip)
4 * Corners 3D 1 Print (stl-bestand staat onder de map 3D corner.stl)
1 * Main PCB Holder 3D 3 Print (stl-bestanden staan onder de map 3D holder1.stl, holder2.stl, holder3.stl)
1 * Brush Holder 3D 2 Print (stl-bestanden staan onder de map 3D brush1.stl en brush2.stl)
Standaard onderdelen
Wees voorzichtig, sommige links bevatten pakketten van 10 of zelfs 100 stuks.
1m * SK9822 LED Strip met 144 LED/m
1 * Cmod S6 FPGA
1 * Geekcreit 30-pins ESP32-ontwikkeling
1 * Geekcreit D1 mini V2.2.0 ESP8266
4 * 74HCT04
5 * DC-DC 5V 4A
1 * DC-motor 775
44 * 100nf 50V
9 * 220uf 16V
10 * Neodymium-magneet 10 mm x 2 mm
1 * Hall-effectsensor
2 * Koolstofborstels Dremel 4000
2 * Motorkoolborstels
2 * Lagers 6803ZZ
2 * Motorsteun 775
2 * DC-aansluiting 5,5 x 2,1 mm
1 * voeding:
1 * knop 8mm
2 * XT30PB-stekker mannelijke en vrouwelijke PCB
2 * XT30-stekker mannelijke en vrouwelijke kabel
2 * 130 Ohm 1/4 W weerstand:
2 * MOSFET IRF3708PBF
2 * 1N5400
1 * Pin-header met enkele rij:
1 * vrouwelijke koptekst:
1 * Kabel 30AWG
1 * Kabel 22AWG
ijzerhandel
1 * MDF 500 mm x 500 mm x 10 mm
1 * MDF 100 mm x 500 mm x 10 mm
4 * MDF 200 mm x 510 mm x 10 mm
1 * acrylglas 500 mm x 500 mm x 2 mm
12 * metalen hoek 40 mm x 40 mm x 40 mm
40 * houtschroef 3 mm x 10 mm
6 * M3 afstandhouder 12 mm
M3- en M4-schroeven
3 m * Kabel 2,5 mm2 enkele draad/stijf
Zwarte verf voor het MDF Wood
Bouwtijd: ~ 10 uur
Bouwkosten: ~ 300€
Stap 1: Bestanden downloaden

Om te beginnen moeten we eerst alles downloaden wat nodig is voor dit project.
Ga hier naar de repository-releasepagina.
Download vervolgens Release.zip van de laatste release en pak deze uit op uw computer.
Elke keer als ik naar een bestand in deze instructibles verwijs, vind je het daar;-)
Stap 2: Firmware programmeren
Stap 2.1: Programmeer FPGA
Om de FPGA te programmeren, moeten we software van xilinx installeren:
Voor Windows 10 moet u installeren: ISE Design Suite voor Windows 10 (~7GB)
Voor Windows 7 of XP kunt u installeren: Lab Tools (~1GB)
Na het installeren van Open ISE iMPACT en klik op "Nee" als daarom wordt gevraagd en ook op "Annuleren" voor een nieuw projectformulier. Sluit de FPGA Board Cmod S6 aan en wacht tot de stuurprogramma's zijn geïnstalleerd. Dubbelklik op grensscan. Klik vervolgens met de rechtermuisknop op het nieuwe venster en kies "Initialize Chain". Klik nogmaals op "Nee" en sluit het nieuwe formulier. Nu zou u een symbool "SPI/BPI" moeten zien, dubbelklik erop. Kies het bestand "SPIFlash.mcs". Kies in het nieuwe formulier "SPI PROM" en "S25FL128S" en Data Width "4". Klik OK". Klik vervolgens nogmaals één keer op het "FLASH"-symbool. Het zou nu groen moeten zijn. Druk vervolgens op "Programma". Klik op "OK" op het nieuwe formulier en wacht. Dit kan enkele minuten duren.
Goed gedaan, de FPGA is klaar;-) Je kunt hem weer loskoppelen!
Stap 2.2: Programmeer ESP32
Installeer de esp32 core op de Arduino ID, je kunt deze tutorial volgen. V1.0.2 wordt aanbevolen.
Benodigde bibliotheken:
- AutoPID door Ryan Downing V1.0.3 (kan worden geïnstalleerd via de bibliotheekmanager)
- ArduinoWebsockets van Gil Maimon, door mij aangepast (download het zipbestand en installeer het)
Open het bestand povdisplay.ino in de map povdisplay.
Kies onder gereedschapsbord: "DOIT ESP32 DEVKIT V1". Laat de overige instellingen zoals ze zijn.
Sluit het esp32-bord aan via USB en download het programma.
Stap 2.3: Programmeer ESP8266
Installeer de ESP8266 core op de Arduino ID, je kunt deze tutorial volgen.
Geen bibliotheken nodig!
Open het bestand motordrive.ino in de map motordrive.
Kies onder Tools Board: "Generic ESP8266 Module". Laat de overige instellingen zoals ze zijn.
Sluit het esp8266-bord aan via USB en download het programma.
Stap 3: Soldeer PCB's




STAP 3.1 Soldeermotor driver PCB
De volgende componenten zijn gesoldeerd:
-
WEMOS1 (Geekcreit D1 mini V2.2.0 ESP8266)
- Soldeer de pin-headers op het WEMOS-bord
- Soldeer de vrouwelijke headers op de PCB
-
DCDC (DC-DC 5V 4A)
- Gebruik 4 pinnen van de pin-header en soldeer de DC-DC-converter rechtstreeks op het bord
- Wees voorzichtig met de oriëntatie, deze moet overeenkomen met de zeefdruk!
- CN1 (DC-aansluiting 5,5 x 2,1 mm)
-
1N5400
Wees voorzichtig met de oriëntatie, de witte lijn op de diode moet aan dezelfde kant zijn als de lijn op zeefdruk
-
220u (220uf 16V)
Wees voorzichtig met de oriëntatie, de witte lijn moet zich aan de andere kant van plus op de zeefdruk bevinden
- R1 en R1 (130Ohm 1/4W weerstand)
-
Q1 en Q2 (MOSFET IRF3708PBF)
Wees voorzichtig met de oriëntatie, de metalen achterkant moet aan de kant liggen met de dikke lijn op de zeefdruk
-
MOTOR (XT30PB stekker vrouwelijke printplaat)
Wees voorzichtig met de oriëntatie, het ronde uiteinde moet aan de kant zijn die is gemarkeerd op de zeefdruk
-
LEDS en TASTER (XT30PB stekker mannelijke PCB)
Wees voorzichtig met de oriëntatie, het ronde uiteinde moet aan de kant zijn die is gemarkeerd op de zeefdruk
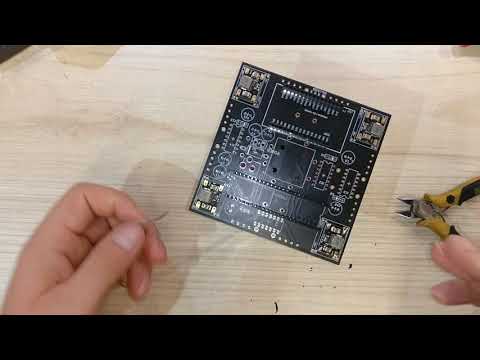
STAP 3.2 Soldeer hoofd-PCB
De volgende componenten zijn gesoldeerd:
-
CMODS6 (Cmod S6 FPGA)
Er moeten pin-headers zijn. Soldeer ze op de PCB
-
ESP (Geekcreit 30-pins ESP32-ontwikkeling)
Gebruik Female Headers en soldeer ze op de PCB
-
DCDC1 - DCDC4 (DC-DC 5V 4A)
- Gebruik 4 pinnen van de pin-header en soldeer de DC-DC-converter rechtstreeks op het bord
- Wees voorzichtig met de oriëntatie, deze moet overeenkomen met de zeefdruk!
- POWER_TEST (DC-aansluiting 5,5 x 2,1 mm)
-
D1 (1N5400)
Let op de oriëntatie, de witte lijn op de diode moet zich aan dezelfde kant bevinden als de lijn op de zeefdruk
-
POWER (XT30PB stekker vrouwelijke printplaat)
Wees voorzichtig met de oriëntatie, het ronde uiteinde moet aan de kant zijn die is gemarkeerd op de zeefdruk
-
C1, C3, C4, C6, C7, C9, C10, C11 (220uf 16V)
Wees voorzichtig met de oriëntatie, de witte lijn op de condensator moet zich aan de andere kant van de plus op de zeefdruk bevinden
- C2, C5, C8, C12 (100nf 50V)
-
IC1 - IC4 (74HCT04)
Zorg ervoor dat u de uitsparing van de IC uitlijnt met de markering op de zeefdruk
STAP 3.3 Hete lijm
De hoofdprintplaat zal zeer snel draaien. Dus we moeten de condensatoren (C1, C3, C4, C6, C7, C9, C10, C11) op de PCB lijmen om problemen te voorkomen. Gebruik daarvoor gewoon een hete lijm.
Stap 4: Strips voorbereiden

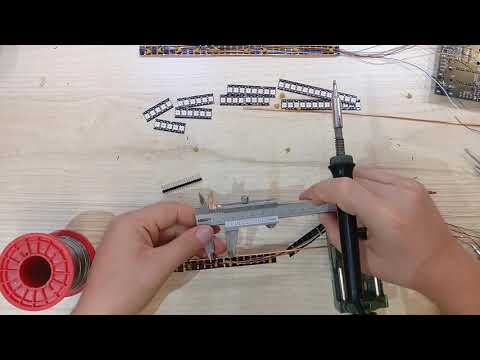



STAP 4.1 Snijd de strip in stukjes
Verwijder de waterbescherming met een schaar.
We hebben vier WING's nodig en elke vleugel bevat vier groepen. Eén WING is speciaal, hij heeft één LED meer dan de andere.
VLEUGEL1:
- G1: 5 LED's (meest buitenste groep)
- G2: 6 LED's
- G3: 8 LED's
- G4: 14 LED's
WING2 - WING4:
- G1: 5 LED's (meest buitenste groep)
- G2: 6 LED's
- G3: 8 LED's
- G4: 13 LED's
Daarom hebben we 129 LED's nodig en onze strip heeft 144, dus we hebben enige tolerantie voor een verkeerde snede;-) In het ergste geval kun je de snede solderen.
Snijd zo gecentreerd mogelijk tussen de LED's.
STAP 4.2 Soldeer kabels naar de LED strip
Soldeer op elk van de ledstripsegmenten twee 30AWG-draden op de klok- en datapin. Dit zijn de twee pinnen in het midden. Zorg ervoor dat u ze op de ingang van de ledstrip soldeert. Normaal gesproken geven pijlen de richting van de gegevensstroom aan. De kabels moeten ongeveer een halve meter lang zijn
Snijd alles van de andere kant van de strip weg om kortsluiting tussen de data- en klokpinnen van de verschillende groepen te voorkomen wanneer we de WING's samenvoegen.
STAP 4.3 Soldeercondensatoren
Soldeer op elke groep twee condensatoren (100nf 50V) aan de achterkant van de ledstripsegmenten aan elk uiteinde. Voor G4 ook eentje in het midden solderen. De kabels moeten onder de condensatoren door om wat ruimte over te laten, maar niet te veel.
STAP 4.4 Zet de Vleugels bij elkaar
Leid voor elke WING de draden van G1 door G2 en vervolgens deze draden door G3 en hetzelfde met G4.
STAP 4.4 Soldeer de groepen aan elkaar
Nu hebben we de koperen kabel nodig (kabel 2,5 mm2 enkele draad/stijf). Snijd het in acht stukken van ongeveer 30 cm lang. Strip de isolatie van alle draden. Trek de kabels zoveel mogelijk recht. Je kunt het ene uiteinde vastzetten in een schroefklem en het andere met een platte tang vasthouden en vervolgens met een hamer op de tang slaan.
Bevestig de kabel aan één kant om het werken ermee te vergemakkelijken. Soldeer er dan de eerste groep aan. Lijn het led-stripsegment uit met de kabel en soldeer deze aan één kant aan de twee condensatoren. De kabel moet plat op de ledstrip rusten. Ga verder met de volgende groep. Zorg ervoor dat de afstand tussen twee LED-groepen ook 7 mm is. Uiteindelijk moeten alle LED's dezelfde opening tussen zich hebben. Ga verder met de andere twee groepen. Op de laatste groep soldeer je alle drie de condensatoren aan de draad.
Knip vervolgens de kabel aan het einde door. Ga verder met een andere kabel aan de andere kant van de strip.
Nu is de eerste WING klaar! Doe hetzelfde voor de andere drie Wings.
STAP 4.5 Buig de condensatoren
Buig ze gewoon allemaal om de stroken dun te maken.
Stap 5: Soldeer de strips op de hoofdprintplaat




STAP 5.1 Controleer polarisatie
Eerst moeten we de polarisatie van de ledstrip weten. Met andere woorden: waar 5V en aarde ten opzichte van de print is. Dit hangt echt af van de LED-strip die je hebt en kan overal omheen.
Houd een WING op de hoofdprintplaat. De pijlen op de ledstrip moeten naar het midden van de print wijzen. Kijk nu of 5V zich aan de DATA- of de CLOCK-kant van de pinnen bevindt.
Als de 5V aan de DATA kant zit zit je goed en kun je het 2.5mm2 koper gebruiken om de LED strip direct op de print te solderen.
Als dat niet het geval is, moet u een 22AWG-kabel gebruiken om de twee zijden door te strepen. Soldeer daarom de kabel aan de ledstrip en streep de linker- en rechterkant door en soldeer die aan de print.
STAP 5.2 Soldeer 2,5 mm2 kabel
Gebruik de rest van de 2,5 mm2 koperen kabel en strip alles. Soldeer ze aan de bovenzijde van de print. Knip de gesoldeerde draad op dezelfde hoogte ongeveer 1 cm af.
STAP 5.3 Soldeer de eerste WING
Gebruik de langere WING en plaats deze op de print (LED's1) zoals weergegeven op de zeefdruk. Soldeer het aan de 2,5 mm2 draden. Maak echt sterke verbindingen dit zal veel kracht zien tijdens het draaien! Sluit vervolgens de kabels voor Groep 1 aan op G1 Data en G1 Clock.
Vergeet niet de stroomaansluiting te solderen zoals hierboven beschreven.
Sluit de ESP32 en de FPGA aan (48 en 1 staat op de gemarkeerde kant) en voed het bord met de voeding.
De meeste buitenste LED's moeten nu blauw knipperen (dit kan tot 40 seconden duren). Zo niet, controleer dan of je CLOCK en DATA op de juiste manier hebt aangesloten.
STAP 5.4 Hall-effectsensor
Soldeer een vrouwelijke pin-header (met drie pinnen) aan de hal. Later zullen we de sensor erop aansluiten.
Soldeer de sensor (Hall-effectsensor) op een mannelijke pin-header. De verbindingen met de senor en de pinheader moeten ongeveer 25 mm zijn.
STAP 5.5 Ga verder met de rest van de WINGS
Voor LEDs2 - LEDs4 == WING2 - WING4 doe hetzelfde proces als bij WING1.
Schakel af en toe de printplaat in en controleer of alles knippert. Het patroon begint met de meest buitenste led en gaat naar binnen en begint opnieuw.
STAP 5.6 Balans
Probeer de hoofdprint in het midden te balanceren met een puntig voorwerp. Als de ene kant meer weegt, probeer dan soldeer aan de andere kant toe te voegen. Het hoeft niet perfect te zijn, maar te veel onbalans zal later resulteren in veel trillingen tijdens het gebruik, wat kan leiden tot mechanische problemen.
Stap 6: Eerste verf

Stap 6.1: Boor
We moeten enkele gaten boren:
Op de 500*500 MDF-plaat hebben we twee gaten nodig. Bekijk het bestand drill_wood_500_500.pdf en boor de gaten volgens het plan.
Op de 500*100 MDF-plaat hebben we veel gaten nodig. Druk daarom het bestand drill_wood_500_100_A4.pdf af en lijn het uit op het bord. Boor gewoon waar de gaten op het papier zijn gemarkeerd.
Stap 6.2: Verf
Verf één kant van elk hout. Voor de 500 x 500 MDF-plaat is dat de kant waarop je hebt geboord.
Verf beide zijden van het 100x500 hout.
Je kunt de metalen hoeken ook zwart verven. Dit ziet er beter uit;-)
De rest worden we geverfd als we alles hebben gemonteerd (de buitenkant van de doos).
Stap 7: Mechanische montage

Stap 7.1 Monteer de printplaat van de motordriver
De print is gemonteerd op de 100 x 500 MDF-plaat. Gebruik de afstandhouders (M3 afstandshouder 12 mm) en enkele m3 schroeven en moeren.
Stap 7.2 Beugels monteren
Monteer de twee beugels (Motor Mount 775) op de 100 x 500 MDF-plaat met M4-schroeven.
Stap 7.3 Houder voorbereiden
De twee blokkeringen (lagers 6803ZZ) moeten worden uitgeschakeld. We hebben alleen de twee buitenste ringen nodig.
Soldeer 22AWG-draden op elk van de ringen. Een zwarte en een rode.
Neem de Holder 3D-geprinte onderdelen en monteer ze.
Plaats alle zeven M3-moeren in hun respectievelijke gaten en schuif de ring met de rode draad eerst op de houder, dan de afstandhouder en dan de ring met de zwarte draad. Voeg het derde stuk bovenop toe en plaats de schroeven.
Knip de twee draden op een afstand van 2 cm door en soldeer de jeck (XT30 Plug Male Cable) eraan. De zwarte kabel gaat naar de gebogen kant.
Stap 7.4 Motor monteren
Schroef de motor (DC Motor 775) op de motorsteun in het midden van de 100 x 500 MDF-plaat.
Monteer de houder op de motor en schroef deze vast.
Stap 7.5 Borstels installeren
Ik was van plan om een Dremel-borstel (koolborstels Dremel 4000) te gebruiken. We moeten een andere steenkool gebruiken (Motorkoolborstels) omdat de steenkool voor de Dremel-borstels een te hoge weerstand heeft. Dat heb ik in het ontwikkelproces over het hoofd gezien. Dus we gebruiken de motorborstels en schuren ze tot het formaat van de dremelborstels.
Knip de draad van de motorborstel af op 5 mm afstand van de kolen.
Vervolgens snijden we de kolen met schuurpapier tot de volgende afmetingen: 8,4 x 6,3 x 4,8 mm
Een kant van de motorborstel is 6,1 mm, we hoeven dus maar twee kanten te schuren.
Je kunt proberen of het makkelijk in de borstelhouder schuift, dan is het goed.
Probeer ook een ronding aan de bovenkant te schuren om de verbinding met de metalen ringen te verbeteren.
Soldeer een 22AWG draad aan de kolen voor beide kolen. Gebruik een rode en een zwarte draad. Steek de veer uit de dremelborstel.
Plaats de borstels in de borstelhouder. De borstel met de rode draad gaat naar boven. De bovenzijde van de houder is iets dikker. Zorg ervoor dat de twee veren elkaar niet raken.
Monteer de houder aan de basis met moeren en m3 schroeven.
Monteer de basis van de borstelhouder met beugels op de tweede motorsteun. Gebruik M4-schroeven en moeren die bij de beugel zijn geleverd.
De motor moet vrij kunnen draaien.
Leid de twee draden tussen de twee beugels.
Knip de twee draden op een lengte zodat ze de print net kunnen bereiken en soldeer de jeck (XT30 Plug Male Cable) eraan. De zwarte kabel gaat naar de gebogen kant.
Soldeer twee 22AWG-draden aan de motoren en knip ze op een afstand om de PCB gemakkelijk te bereiken en soldeer de jeck (XT30 plug vrouwelijke kabel) eraan. De zwarte kabel gaat naar de gebogen kant.
Stap 8: Voltooien
Aanbevolen:
Hoe een Battlebot te bouwen met karton en Arduino 7 stappen (met afbeeldingen) Antwoorden op al uw "Hoe?"
 Antwoorden op al uw \"Hoe?\"")
Hoe een gevechtsbot te bouwen met karton en Arduino: Ik heb gevechtsbots gemaakt met behulp van de Arduino UNO en karton werd gebruikt om de lichamen te bouwen. Ik probeerde betaalbare benodigdheden te gebruiken en gaf de kinderen creatieve vrijheid bij het ontwerpen van hun gevechtsrobots. Battlebot ontvangt opdrachten van de draadloze controller
Hoe maak je een stopwatch met Arduino 8 stappen (met afbeeldingen) Antwoorden op al uw "Hoe?"
 Antwoorden op al uw \"Hoe?\"")
Hoe maak je een stopwatch met behulp van Arduino: dit is een zeer eenvoudige Arduino 16 * 2 lcd-scherm stopwatch ……….. Als je deze Instructable leuk vindt, abonneer je dan op mijn kanaal https://www.youtube.com /ZenoModiff
Een computer demonteren met eenvoudige stappen en afbeeldingen: 13 stappen (met afbeeldingen) Antwoorden op al uw "Hoe?"
 Antwoorden op al uw \"Hoe?\"")
Een computer demonteren met eenvoudige stappen en afbeeldingen: dit is een instructie over het demonteren van een pc. De meeste basiscomponenten zijn modulair en gemakkelijk te verwijderen. Wel is het belangrijk dat je er goed over georganiseerd bent. Dit zal helpen voorkomen dat u onderdelen kwijtraakt, en ook bij het maken van de hermontage e
Hoe maak je een lijnvolger met Arduino 8 stappen (met afbeeldingen) Antwoorden op al uw "Hoe?"
 Antwoorden op al uw \"Hoe?\"")
Hoe maak je een lijnvolger met Arduino: Als je aan de slag gaat met robotica, bevat een van de eerste projecten die beginners maken een lijnvolger. Het is een speciale speelgoedauto met eigenschap om langs een lijn te rijden die normaal gesproken zwart van kleur is en contrasteert met de achtergrond. Let's get star
Hoe een fysiek boek om te zetten in een e-boek? 7 stappen (met afbeeldingen) Antwoorden op al uw "Hoe?"
 Antwoorden op al uw \"Hoe?\"")
Hoe zet ik een fysiek boek om in een e-boek?: Als student met als hoofdvak Scheikundige Technologie heb ik meestal bulktekstboeken, technische boeken en aantekeningen om te scannen (soms af te drukken). Ik ben al een tijdje op zoek naar een efficiënte boekscanner, maar de meeste zijn duur, extreem groot. Binnenkort