
Inhoudsopgave:
- Auteur John Day day@howwhatproduce.com.
- Public 2024-01-30 11:17.
- Laatst gewijzigd 2025-01-23 15:01.

Enige tijd geleden heb ik mijn Wifi PPM-controller gepost. Het werkt best goed. Alleen het bereik is wat kort. Ik heb een oplossing gevonden voor dit probleem. De ESP8266 ondersteunt een modus genaamd ESPNOW. Deze modus is veel meer laag niveau. Hij verliest de verbinding niet zo gemakkelijk en als hij de verbinding verliest, wordt hij onmiddellijk opnieuw aangesloten.
Ik gebruik drie ESP8266. Een daarvan is de ESPNOW-ontvanger, de andere is de ESPNOW-zender en de derde is het toegangspunt waarmee u verbinding kunt maken. De derde is nodig omdat de ESPNOW-zender niet tegelijkertijd een toegangspunt kan zijn. Ik heb ook enkele antennes toegevoegd om een beter bereik te krijgen.
Er is een tweede toegangspunt direct bij de ontvanger. Als je hier verbinding mee maakt heb je hetzelfde als bij het oude WifiPPM project.
Ik heb ook ondersteuning toegevoegd voor de MSP-protocolontvanger. Dit is het "MultiWii Serial Protocol" dat wordt ondersteund door MultiWii, Betaflight, Cleanflight en vele andere vluchtcontrollers.
Stap 1: Onderdelenlijst




U hebt drie ESP8266-modules van welke aard dan ook nodig. Maar u wilt het beste bereik. Dus ik stel voor om ESP8266-modules met antennes te gebruiken. Het werkt ook zonder antennes. Ik gebruik de volgende onderdelen:
2 x ESP07 (ESP8266-module met antenneconnector)
1x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX aan ontvangerzijde
1 x ESP8266 2, 4 / 5 GHz 3dbi Wlan Wifi Antenne SMA Stecker / male + I-PEX Adapter aan zenderzijde
3, 3 V-voeding voor alle ESP8266-modules
Je hebt ook een pc met Arduino IDE nodig: https://www.arduino.cc/en/Main/SoftwareESP8266 ondersteuning voor Arduino IDE. Volg deze instructies: https://learn.sparkfun.com/tutorials/esp8266-thin…Websocket-bibliotheek voor Arduino:
Stap 2: Download en flash de schetsen



De schetsen kunt u hier downloaden.
Pak het bestand uit. Er zijn drie mappen: Master-AP, Sender, Receiver
Master-AP: Het is de schets voor het toegangspunt. Open de schets met arduino IDE. Stel de CPU-frequentie in op 160 MHz in het menu Extra en upload de schets naar de ESP12.
Afzender: Dat is de schets voor de MSPNOW-afzender. Stel de CPU-frequentie in op 160 MHz en upload deze naar een van de ESP07.
U kunt in de eerste afbeelding zien hoe u de ESP8266-module aansluit om te knipperen.
Verbind nu de ESP12 (Access point) en de Sender ESP07 seriële poorten en stroomaansluitingen (tweede foto): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Start beide modules en maak verbinding met het toegangspunt "Long-Range-WifiPPM/MSP". Het wachtwoord is "WifiPPM/MSP"
Open een browser en open het IP-adres 192.168.4.1. De controlewebsite verschijnt. Klik op de knop "Wifi-info". Er verschijnt een berichtvenster met de MAC van de afzender en de MAC van de ontvanger.
Open de schets van de ontvanger in Arduino IDE. Wijzig de regel "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (derde foto) naar het Mac-adres van de afzender dat op de website wordt weergegeven. De ontvanger Mac zou in orde moeten zijn. Zorg ervoor dat de CPU-frequentie is ingesteld op 160 MHz en upload de schets naar de tweede ESP05.
Stap 3: Sluit de ontvanger aan op de Flight Controller en stel Cleanflight in



Verbind nu de ontvanger met de vluchtcontroller. Uw vluchtcontroller moet een uitgang van 3, 3 Volt hebben met minimaal 200 mA. Als dat niet het geval is, hebt u een extra 3, 3V-spanningsregelaar nodig.
Sluit GND van de ESP aan op GND van de vluchtcontroller. Sluit VCC van de ESP aan op 3, 3V van de vluchtcontroller of op de extra 3, 3V-spanningsregelaar.
U kunt de PPM-uitgang of de seriële MSP-uitgang gebruiken.
Voor MSP-uitvoer sluit u de TX van de ESP8266 aan op de RX van een willekeurige seriële poort van uw vluchtcontroller. (Foto 1)
Sluit voor PPM-uitgang GPIO5 van de ESP8266 aan op de PPM-ingang van de vluchtcontroller. (Foto 1)
Na het bedraden van de ESP start u de vluchtcontroller en opent u cleanflight. Verbind met uw mobiele telefoon met het "WifiPPM/MSP" toegangspunt. Het wachtwoord is "WifiPPM/MSP"
Voor MSP: Open het tabblad Poorten en stel MSP in op de seriële poort waarop u de ESP8266 hebt aangesloten (Afbeelding 2). Opslaan en opnieuw opstarten. Ga naar het configuratietabblad en stel de ontvanger in op "MSP seriële ontvanger" (Afbeelding 3). Opslaan en opnieuw opstarten.
Voor PPM: Lees in de handleiding van je flight controller hoe je PPMGo instelt naar het configuratie tabblad en zet de ontvanger op "PPM receiver" (Afbeelding 4). Opslaan en opnieuw opstarten.
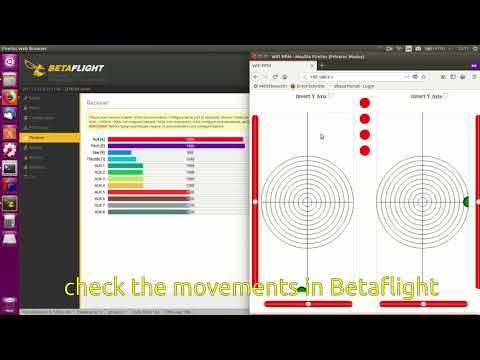
De volgende setup is voor beide ontvangers hetzelfde: Ga naar het tabblad ontvanger. Stel de kanalen in op "RTAE1234" (Afbeelding 5/Video). Sla de instelling op.
Open nu een browser op je smartphone. Open de site 192.168.4.1 (Afbeelding 6). Nu kunt u de controller controleren.
Als het werkt, start u de twee afzender ESP8266. Maak verbinding met het toegangspunt "Long Range WifiPPM/MSP". Het wachtwoord is "WifiPPM/MSP". Open opnieuw de website 192.168.4.1. Controleer nogmaals in cleanflight of het werkt.
Sluit de antennes aan op de ESP07-modules.
Stap 4: wat meer informatie

Bij normaal gebruik zijn er twee toegangspunten. Het "WifiPPM/MSP"-toegangspunt is net als het vorige WifiPPM-project. Je kunt het gebruiken als je gewoon een snelle vlucht wilt maken zonder extra modules aan te sluiten als je geen langeafstandsverbinding nodig hebt. Als u verbinding maakt met "Long Range WifiPPM/MSP" neemt de langeafstandscontroller de controle over.
Misschien wil je weten hoe lang "lange afstand" is. Eigenlijk weet ik het niet zo goed. Het is minstens een paar honderd meter. Maar ik kon het tot nu toe niet testen. Het verliest geen verbinding in mijn complete flat.
Ik heb MSP-besturing toegevoegd omdat ik dacht dat ik een back-channel voor telemetriegegevens kon maken. Maar dat werkte nooit stabiel. Hoe dan ook, het MSP-protocol is nauwkeuriger dan ppm, omdat het niet zo afhankelijk is van timing. Misschien geeft het problemen met trage vluchtcontrollers omdat er veel verkeer is op de seriële poort. Met mijn Noxe F4 flight controller werkt het zonder problemen.
Als je configuratieproblemen hebt, kijk dan eens naar het oude WifiPPM-project.
Aanbevolen:
Lange belichting en astrofotografie met Raspberry Pi 13 stappen (met afbeeldingen) Antwoorden op al uw "Hoe?"
 Antwoorden op al uw \"Hoe?\"")
Lange sluitertijd en astrofotografie met Raspberry Pi: Astrofotografie is de fotografie van astronomische objecten, hemelse gebeurtenissen en delen van de nachtelijke hemel. Naast het vastleggen van de details van de maan, de zon en andere planeten, heeft astrofotografie de mogelijkheid om objecten vast te leggen die onzichtbaar zijn voor het gezoem
ECG-logger - een draagbare hartmonitor voor gegevensverzameling en -analyse op lange termijn: 3 stappen

ECG Logger - een draagbare hartmonitor voor gegevensverzameling en -analyse op lange termijn: Eerste release: oktober 2017 Laatste versie: 1.6.0 Status: stabiel Moeilijkheidsgraad: hoog Vereiste: Arduino, programmeren, hardware bouwen Unieke opslagplaats: SF (zie onderstaande links) Ondersteuning: alleen forum, geen PMECG Logger is een draagbare hartmonitor voor langdurig
Wifi PPM (geen app nodig): 4 stappen (met afbeeldingen)
: 4 stappen (met afbeeldingen)")
Wifi PPM (geen app nodig): ik wilde mijn doe-het-zelf micro-indoor quadrocopter bedienen met mijn smartphone, maar ik kon hier geen goede oplossing voor vinden. Ik had een paar ESP8266 wifi-modules liggen, dus besloot ik er zelf een te maken. Het programma start een wifi-toegangspunt met een HTML
Lange afstand draadloze waterniveau-indicator met alarm - Bereik tot 1 km - Zeven niveaus: 7 stappen

Lange afstand draadloze waterniveau-indicator met alarm | Bereik tot 1 km | Zeven niveaus: bekijk het op YouTube: https://youtu.be/vdq5BanVS0YJe hebt misschien veel bedrade en draadloze waterniveau-indicatoren gezien die een bereik van 100 tot 200 meter zouden bieden. Maar in deze instructable zie je een Long Range Wireless Water Level Indi
Fotografie met lange belichtingstijden: 4 stappen

Fotografie met lange belichtingstijd: in deze instructable laat ik je zien hoe je kunt 'tekenen' met licht, met behulp van een camera en verlichting. Ook hoe je één persoon twee keer in een foto kunt laten verschijnen zonder de foto te bewerken Een camera (een die een blub-instelling kan hebben of lange belichtingstijden kan maken) Ligh